Синхронные и асинхронные двигатели, их отличия и разница в применении. отличие синхронного от асинхронного двигателя
Содержание:
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент. Чем меньше якорь, тем меньше инерция и, следовательно, электродвигатель быстрее разгоняется, и машина работает быстрее.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Статьи
Синхронный и асинхронный генератор. Какой лучше?
Перебои в централизованном электроснабжении и внезапные отключения электроэнергии, перегрузки на линиях электропередач, скачки напряжения в сети — эти и многие другие причины приводят к необходимости покупки электростанции для аварийного или автономного электроснабжения производственных цехов, загородных домов. И тут возникает вопрос: какой генератор выбрать? Одним из критериев становится выбор между синхронным и асинхронным вариантом исполнения. Попробуем разобраться, в чем отличия, преимущества и недостатки.
Преимущества и недостатки синхронных генераторов
В силу особенностей конструкции синхронные генераторы легче легко переносят кратковременные перегрузки (в том числе пусковые), обеспечивают более высокое качество тока и правильную синусоиду напряжения, обладают достаточно высокой стабильностью напряжения. Они отлично подходят для электропитания индуктивных нагрузок с высоким стартовым током (например, циркулярные пилы, компрессоры, насосы) и более предпочтительны для бытового потребления.
Сегодня выпускаются синхронные генераторы со щеточными и бесщеточными системами возбуждения ток. Второй вариант более предпочтительный. В щеточных системах вполне вероятно частичное «выгорание» щеток после прохождения больших токов, что приводит к перегреву агрегата. Поэтому для таких моделей рекомендуется регулярное обслуживание с целью контроля за состоянием щеточного узла, а при необходимости очистки или замены щеток.
К недостаткам относится плохая защита агрегатов от внешних воздействий (вода, пыль). За счет того, что охлаждение происходит воздушным путем, велика вероятность попадания внутрь всего, что находится в воздухе. Клирфактор синхронных генераторов может достигать показателя в 15%, что приводит к неустойчивости в работе электроприборов с импульсно-фазовым управлением, бесполезному нагреву и неравномерности вращения электромоторов.
Также стоит отметить, что синхронные генераторы не позволяют подключать к отдельным фазам потребителей гораздо более высокой мощности. В противном случае практически неизбежно повреждение приборов малой мощности при подключении.
Преимущества и недостатки асинхронных генераторов
Асинхронные генераторы устойчивы к коротким замыканиям, а устройства автоматической регулировки напряжения сглаживают перепады напряжения. Поэтому они особенно востребованы для электросварки и питания активных нагрузок. Конструкция таких агрегатов более простая, а сами они более надежные и долговечные.
Клирфактор асинхронных агрегатов составляет не более 2%, и это обозначает, что они вырабатывают электроэнергию практически без вредных составляющих. Поэтому при использовании таких агрегатов телевизионные приемники, источники бесперебойного питания работают устойчивее, а сварочные аппараты обеспечивают более качественный шов.
Роторы асинхронных генераторов производят незначительное тепловыделение, не требующее охлаждения, что позволяет герметизировать внутреннюю полость агрегата. Благодаря этому значительно расширяется сфера использования агрегатов, которые могут эксплуатироваться в условиях повышенной запыленности и высокой влажности. Такая герметизация способствует и более продолжительному сроку службы электростанций. При эксплуатации асинхронных генераторов допускается подключение к разным фазам потребителей разной мощности (допустимое значение неравномерности нагрузок по фазам составляет до 70%), что практически невозможно в случае использования синхронных агрегатов.
К недостаткам в первую очередь относится более низкая способность переносить пусковые токи, однако это вполне компенсируется стартовым усилителем. Благодаря оснащению специальными стартовыми усилителями асинхронные электростанции практически не уступают синхронным генераторам по своим пусковым характеристикам, обеспечивая эффективный запуск оборудования и техники с высоким стартовым током. За счет того, что стартовый усилитель обеспечивает возбуждение на короткое время, достаточное для запуска электродвигателя, перегрев агрегата не происходит. Кроме того, в агрегатах, как правило, предусмотрен переключатель для отключения стартового усилителя (например, для работы сварочных аппаратов).
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
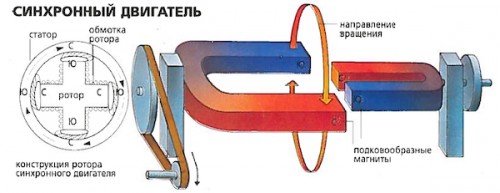
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
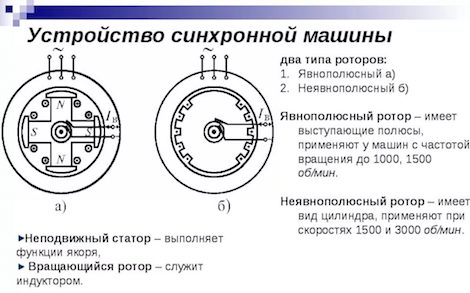
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянноготока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когдаэнергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающийтрансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Плюсы и минусы синхронных альтернаторов
Качественные СА должны комплектоваться медной, а не слабой алюминиевой обмоткой (будьте внимательны: некоторые производители таким образом пытаются снизить расходы на производство). Именно качественная обмотка и щеточный механизм обеспечивают равномерность тока на выходе (с отклонением не более 5 %), позволяют легко переносить повышенные нагрузки при запуске и непродолжительные колебания напряжения.
Чистый электроток очень важен для таких высокочувствительных пользователей, как ноутбуки, компьютеры, принтеры, телефоны, лабораторное и медицинское оборудование. И даже для такой привычной бытовой техники, как холодильники, ТВ, стиральные машинки также предпочтительным будет электроток, вырабатываемый синхронным генератором. Кроме того, только к щеточным ИБП можно подключать АВР (автоматический ввод резерва).
Итак, к неоспоримым плюсам щеточного узла и медной обмотки СА отнесем:
- стабильность напряжения;
- качественный электроток;
- надежность в работе.
При этом постоянное движение щеток способствует чрезмерному нагреву генератора. Применяющаяся в СА воздушная система охлаждения с вентилятором в целом достаточно надежна, но имеет существенный недостаток – эффект пылесоса. Активное втягивание вовнутрь пыли, грязи, влаги часто становится причиной неполадок в системе.
Но прогресс не стоит на месте, и сегодня ведущие производители находят все новые способы защиты оборудования от внешних факторов.
Выбирая генератор, обязательно интересуйтесь, к какому классу защиты он относится.
Минусы щеточных альтернаторов:
- попадание пыли и влаги;
- необходимость периодического техосмотра и замены щеток;
- высокая стоимость;
- создание помех для радиоволн.
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.
Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока